Differenziali
& Trazione
Una
trattazione semplificata
(ma non troppo)
dedicata
a chi sa “come” si guida ma non “perchè”
e a chi non sa né “come” né “perchè”
L’Uso
dei Blocchi nella Guida
UNA RUOTA SENZA ADERENZA
DUE RUOTE SENZA ADERENZA
TRE RUOTE SENZA ADERENZA
TABELLA RIASSUNTIVA
CONFRONTI
QUANTITATIVI
COEFFICIENTE DI ATTRITO
LA TRAZIONE
IL CONCETTO DI MAG
IL MAG PER IL PONTE
VALUTAZIONI GLOBALI
CASO GLOBALE
STERRATO & FANGO
SABBIA & PISTE
CONSIDERAZIONI FINALI
DIREZIONALITA' DELLO
STERZO
INSERIMENTO DEL BLOCCO
AFFIDABILITA'
![]()
![]()
I Diversi Tipi di Differenziale
Introduzione
Il
differenziale è stato inventato da un ingegnere scozzese ormai più di un
secolo e mezzo fa, ed è diventato rapidamente l’elemento chiave del sistema
di trasmissione (o catena cinematica) di ogni veicolo con più di due ruote. I
veicoli stradali utilizzano generalmente un differenziale che trasmette la
coppia motrice generata dal motore (e moltiplicata dal cambio) a due ruote
motrici, permettendo loro di ruotare a velocità diverse per esempio percorrendo
una curva. I veicoli fuoristrada utilizzano invece due o tre differenziali,
oltre che un riduttore che aumenta ulteriormente il valore della coppia motrice
disponibile. Nei veicoli a trazione integrale permanente vi sono tre
differenziali: uno centrale che ripartisce la coppia motrice ai due assi
anteriore e posteriore, e uno per ogni asse che ripartisce a sua volta la coppia
motrice alla ruota destra e alla ruota sinistra. In questo modo non solo le
ruote da un lato possono ruotare a velocità diversa da quelle dell’altro
lato, ma anche le ruote anteriori possono ruotare complessivamente a velocità
diversa da quelle posteriori, come è necessario quando si percorre una curva in
buone condizioni di aderenza. Molti veicoli a trazione integrale inseribile
utilizzano solo due differenziali, uno sull’asse anteriore e uno sull’asse
posteriore: in questo modo i due assi sono vincolati a ruotare alla stessa
velocità, e percorrendo una curva le piccole differenze di velocità di
rotazione tra i due assi anteriore e posteriore dovranno essere assorbite da un
leggero slittamento delle ruote rispetto al fondo stradale.
Si
può spiegare questo secondo punto qui sopra in un modo un po’ diverso. Noi
supporremo che “qualcuno” abbia fatto tutti “gli esperimenti e le misure
necessarie” sui diversi differenziali che considereremo, e che questo
“qualcuno” sia riuscito a condensare tutte le sue misure e scoperte in due,
semplici e chiare Leggi. La Prima Legge descrive come sono legate tra loro le
velocità degli assi condotti e conduttore, e la Seconda Legge dice come sono
legate tra loro le coppie applicate e disponibili sui tre assi. Conoscendo le
due Leggi per un certo tipo di differenziale non abbiamo bisogno d’altro per
fare tutte le previsioni possibili in merito alle prestazioni di un veicolo
equipaggiato con quel tipo di differenziale.
Noi
partiremo da queste Leggi, che non porremo in discussione poiché rappresentano
con ottima approssimazione per i nostri scopi il funzionamento di un
differenziale reale, e il nostro primo obiettivo è qui di capirne bene il
significato.
Ma
talvolta le Leggi si possono mettere in discussione, e quando si riesce a
mettere in discussione una Legge che tutti credono proprio vera, ebbene, allora
è tempo di rivoluzioni: agli inizi del 1900, qualcuno, ragionando delle leggi
relative a cose semplici come regoli e orologi, ha fatto una bella
rivoluzione… ma non è il nostro caso!
Il differenziale “open”
Cominciamo
ad analizzare il funzionamento di un differenziale "open". Esso è
costituito da un albero in entrata (albero o asse conduttore) e due alberi in
uscita (alberi o assi condotti) collegati tra loro da un complesso di ingranaggi
tale da distribuire la coppia generata dal motore, applicata all’albero
conduttore, equamente ai due alberi condotti indipendentemente dalla velocità
di rotazione dei due alberi condotti. Il differenziale tradizionale, chiamato
generalmente “open” (“aperto”) per i motivi che vedremo in seguito, è
descritto da regole (o Leggi) molto semplici, che possiamo riassumere come
segue:
·
Legge
1: La velocità di rotazione dell’albero conduttore è sempre il valore medio
delle velocità degli alberi condotti.
·
Legge
2: La coppia disponibile su ciascuno degli alberi condotti è sempre la metà di
quella applicata all’albero di
entrata o conduttore.
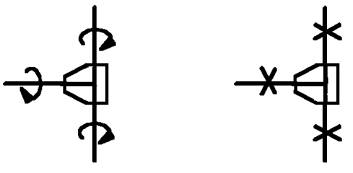
Per facilitare la comprensione delle “Leggi” dei differenziali conviene aiutarsi con una semplice rappresentazione grafica:
·
indichiamo con una freccia che gira
una certa velocità di rotazione:
![]() ,
,
·
con due frecce una velocità
di rotazione doppia:
![]() ,
,
·
mentre useremo una “X” per rappresentare nessuna rotazione:
![]() .
.
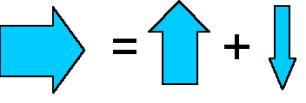
Useremo
una freccia spessa per rappresentare invece la coppia disponibile, o, in modo
quasi equivalente, la trazione disponibile su una ruota collegata a
quell’asse, numericamente ottenuta dividendo la coppia per il raggio di
rotolamento della ruota. Queste quattro frecce rappresentano perciò quattro
unità di coppia o di trazione, a seconda del contesto:
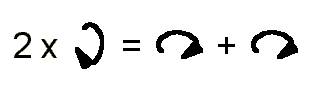
Con
questa simbologia possiamo rappresentare graficamente le leggi dei
differenziali, in modo da capirle e ricordarle meglio. Cominciamo subito col
differenziale "open". Con due semplici passaggi aritmetici scopriamo
subito che la Legge 1 si può enunciare in modo un po’ diverso ma del tutto
equivalente (poiché ottenuto solo con passaggi algebrici):
·
Legge
1b: Il doppio della velocità di rotazione dell’albero conduttore è uguale
alla somma delle velocità degli alberi condotti.
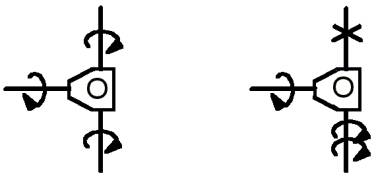
Graficamente
rappresentiamo due casi estremi: a sinistra il caso in cui i due alberi condotti
ruotino alla stessa velocità (per esempio nella marcia in rettilineo), a destra
il caso in cui la trazione su una ruota sia così cattiva da lasciarla ruotare a
vuoto. Mettiamo poi una “O”
dentro al simbolo che rappresenta il differenziale per ricordare che si tratta
di un differenziale "open", e altri simboli intuitivi quando
considereremo altri tipi di differenziale.
L’applicazione
della prima Legge (versione b!) ci permette di scrivere:
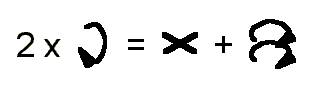
il
cui significato dovrebbe essere ormai ovvio, e facilmente memorizzabile grazie
ai disegni semplificati che abbiamo usato.
Consideriamo
ora una rappresentazione grafica per la seconda legge:
·
Legge
2: La coppia disponibile su ciascuno degli alberi condotti è sempre la metà di
quella applicata all’albero conduttore.
Possiamo
rappresentare questo così:
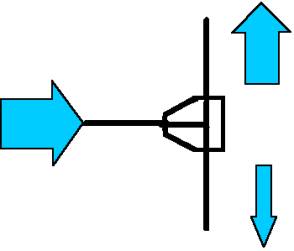
Per
essere precisi, la larghezza della freccia indica il valore di coppia
sull’asse, e la direzione della freccia rispetto al differenziale indica se
l’asse è conduttore o condotto: frecce entranti indicano assi conduttori e
frecce uscenti indicano assi condotti (queste frecce non indicano vettori!).
Bene,
se è tutto chiaro passiamo subito agli altri tipi di differenziali.
Il differenziale “locked”
Come
ogni macchina o meccanismo, il differenziale “open” non è la soluzione di
tutti i problemi: dalle regole che abbiamo visto sopra la coppia disponibile
agli alberi condotti è sempre uguale, e questa non è una buona cosa in tutte
le situazioni. Per esempio, in condizioni di scarsa aderenza su una ruota,
possiamo applicare ad essa solo una minima coppia se non vogliamo che la sua
velocità di rotazione raggiunga valori tali da creare rischi di danni meccanici
alla catena cinematica, e l’effetto del differenziale "open" sarà
allora quello di trasferire lo stesso minimo valore di coppia alla ruota in
condizioni di buona trazione: risultato, la coppia totale applicata non sarà
sufficiente a far avanzare il veicolo.
Per
ovviare a questo inconveniente, che può accadere con una certa frequenza su un
veicolo con tre differenziali e in condizioni di scarsa aderenza quali si
incontrano spesso nella guida fuoristrada, sono stati realizzati differenziali
bloccabili (“locked”) nei quali tramite un comando meccanico (o elettrico o
pneumatico) viene azionato all’interno del differenziale un meccanismo che
rende solidale la rotazione dei due assi condotti. Un differenziale bloccabile
è in generale inserito nel blocco del riduttore dei veicoli a tre
differenziali. Nel caso il differenziale bloccabile sia su uno dei ponti, in
caso di perdita di aderenza di una delle due ruote, il differenziale bloccato la
obbliga comunque ruotare alla stessa velocità della ruota che ha ancora
aderenza, e la coppia motrice viene applicata alle due ruote e scaricata a terra
dalla ruota con più aderenza.
Alcuni
differenziali "locked" sono automatici, e funzionano in modo inverso:
i due assi condotti sono sempre solidali, ma se le condizioni di guida
richiedono che una delle due ruote ruoti più velocemente dell’altra, per
esempio percorrendo una curva, l’asse corrispondente viene “sganciato” e
la ruota può ruotare più velocemente.
Nonostante
alcuni differenziali bloccabili (o sbloccabili) siano meccanicamente abbastanza
complessi, il loro funzionamento è semplicissimo, essendo, quando bloccato, del
tutto analogo a quello di un asse rigido, tipo go-kart: meccanica semplice,
Legge semplice. E infatti un differenziale "locked" è descritto da
una Prima Legge molto semplice:
·
Legge
1: Le velocità di rotazione degli alberi condotti sono sempre uguali tra loro
e uguali alla velocità di rotazione dell’albero conduttore.
La
seconda differenza rispetto al differenziale "open" è la Legge
relativa al modo in cui la coppia motrice applicata all’albero conduttore si
distribuisce tra gli alberi condotti: nel caso del differenziale "locked"
si ha:
·
Legge
2: La somma della coppia motrice disponibile sui due assi condotti è uguale
alla coppia motrice applicata all’asse conduttore.
La
Legge non ci dice nulla su come va la coppia motrice su ciascun asse condotto,
la coppia su ciascun asse dipende dalle condizioni di aderenza delle ruote,
ovviamente, e sarà maggiore sull’albero che aziona la ruota avente maggiore
aderenza. Graficamente, supponendo che una ruota abbia più aderenza e una meno,
possiamo adottare questo disegno per ricordare la Seconda Legge per un
differenziale "locked":
Una
importante conseguenza la possiamo trarre immediatamente: mentre gli alberi
condotti di un differenziale "open" sono dimensionati per trasferire
senza eccessiva torsione metà della coppia applicata in ingresso al
differenziale, come specificato dalla Legge 2 dei differenziali
"open", la Legge 2 dei differenziali "locked" non è così
“specifica”, e la coppia su ciascun asse può andare da zero al valore
massimo disponibile sull’asse conduttore.
Se
ne trae una conclusione molto rilevante agli effetti pratici: gli
alberi condotti di un differenziale "locked" devono essere
dimensionati per una coppia applicata doppia rispetto a quella considerata per
un differenziale "open". In pratica, questo è il motivo per cui
adottando su un veicolo un differenziale "locked" di qualunque tipo è
necessario sostituire anche gli assi con assi rinforzati.
Differenziali TorSen
L’avvento
generalizzato dell’elettronica in campo automobilistico e la diffusione dei
sistemi ABS ha permesso l’introduzione di un’altro metodo per ovviare al
problema del poco controllo sulla distribuzione della coppia motrice agli assi
condotti tipico del differenziale "open". Il controllo elettronico
della trazione, utilizzando i sensori ABS, applica il freno alla ruota che ruota
molto più velocemente dell’altra sullo stesso asse, cioè a quella che sta
slittando: in questo modo si può dare gas senza problemi e il differenziale
"open" manderà una buona quantità di coppia motrice alla ruota che
slitta (dove però è assorbita dal freno) e alla ruota con trazione, che
provvederà a far muovere il veicolo. Questa soluzione ha come caratteristica
principale una notevole semplicità costruttiva, e un basso costo nei veicoli
che sono equipaggiati con ABS, ed è certamente efficace. Tuttavia anche essa ha
suoi difetti: innanzi tutto, perché il sistema intervenga, è necessario che
una ruota slitti: questo comporta comunque una perdita di aderenza, e quindi di
trazione, prima che il sistema intervenga, con conseguente riduzione della
velocità del veicolo. Inoltre l’applicazione del freno sulla ruota con poca
aderenza assorbe coppia motrice, riducendone la quantità disponibile per far
avanzare il veicolo. Infine, su terreni molto scivolosi, il continuo intervento
del sistema può sollecitare pesantemente i freni. Per questi motivi questo tipo
di sistema non è il preferito per i veicoli destinati ad un pesante uso
fuoristrada in condizioni difficili, per quanto la notevole semplicità
meccanica spinga i costruttori ad un uso quanto più generalizzato possibile.
Con
la disponibilità di materiali nuovi (es. oli che aumentano la viscosità al
crescere della temperatura, guarnizioni d’attrito resistenti alle alte
temperature) e con la possibilità di eseguire lavorazioni di precisione
complesse (quali ingranaggi ipoidi) sono stati concepiti nuovi tipi di
differenziale, allo scopo di ovviare al difetto del differenziale
"open" che abbiamo visto. Vi sono sostanzialmente due famiglie di
differenziali di questo tipo: i differenziali tipo TorSen (Torque Sensing) e i
differenziali LSD (Limited Slip Differential).
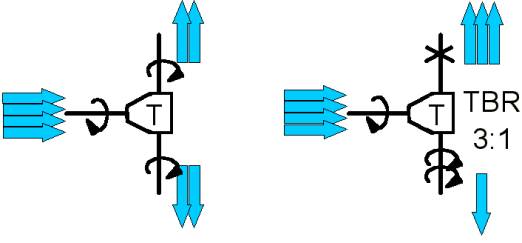
TBR
= 3 o anche talvolta
TBR
1 : 3
al
quale viene applicato sull’albero conduttore una coppia di 2000Nm trasmetterà
500Nm alla ruota che slitta e 1500Nm alla ruota che ha maggiore trazione. Il
vantaggio rispetto un differenziale "open" è evidente: la ruota che
non slitta riceve una coppia motrice sostanzialmente maggiore, a tutto beneficio
della trazione. Adottando lo stesso linguaggio usato prima per definire le
“Leggi” che descrivono il differenziale TorSen possiamo esprimere la Legge
sulla coppia come:
·
Legge
2: La somma delle coppie disponibili sugli alberi condotti è sempre uguale a
quella applicata all’albero condotto, ma l’albero che ruota più lentamente
riceve TBR volte più coppia dell’albero che ruota più velocemente.
Graficamente:
Per
quanto riguarda la relazione tra le velocità di rotazione degli assi condotti
rispetto all’asse conduttore, il comportamento del TorSen è del tutto simile
al differenziale "open", e pertanto la Prima Legge è assolutamente
identica:
·
Legge
1: La velocità di rotazione dell’albero conduttore è sempre il valore medio
delle velocità degli alberi condotti (come
in un differenziale ""open"")
%bloccaggio
= (TBR - 1) /
(TBR + 1)
ad
esempio un differenziale con TBR = 3 avrà un coefficiente di bloccaggio del
50%.
Si
può dire dunque che un TorSen è una sorta di compromesso che cerca di
mantenere il meglio del differenziale "open", permettendo agli assi
condotti di ruotare a velocità diverse, e un po’ del buono di un
differenziale "locked", trasmettendo più coppia motrice alla ruota
con maggiore trazione, cosa utile sui terreni con poca aderenza.
Per
contro, il TorSen non distribuisce uniformemente la coppia tra i due assi nelle
curve, poiché nelle curve una ruota gira più velocemente dell’altra, e il
TorSen agisce comunque rispettando al Legge 2: l’effetto è che il guidatore
percepisce una sensazione di auto-raddrizzamento delle ruote, modesta ma
avvertibile. L’altro difetto è che il TorSen non è completamente bloccante,
e quindi quando per esempio una ruota è completamente sollevata risulta, a
differenza di un "locked", inefficace. Dunque, molto come al solito
dipende dall’applicazione che si ha in mente, ovvero dai terreni sui quali si
guida, e vedremo in seguito un modo per confrontare in modo quantitativo le
caratteristiche di trazione di catene cinematiche con differenziali di diverso
tipo in funzione dell’aderenza del suolo. Comunque, questa nostra breve
analisi ci dà subito alcune indicazioni pratiche. La prima è che in generale, per
minimizzare le reazioni negative al volante sarà conveniente adottare un TorSen
con un TBR basso sull’asse anteriore, e un TorSen con un TBR maggiore
sull’asse posteriore,
che influenza di meno la guida in curva.
Un
secondo aspetto pratico è che anche con
il TorSen è necessario adottare assi rinforzati,
poiché la coppia sull’asse può essere sensibilmente superiore a quella che
produce un differenziale "open".
Limited Slip Differential
La quarta grande famiglia di differenziali sono gli LSD (Limited Slip Differential, o Differenziali a Slittamento Limitato). Qui c’è forse la più grande varietà di configurazioni, ed è piuttosto difficile dare delle Leggi semplici e generali come negli altri casi, ma possiamo comunque ricondurre i differenziali a slittamento limitato a due grandi famiglie.
In una prima famiglia mettiamo quelli nei quali un qualche “sensore” rileva una differenza di rotazione tra gli assi (slittamento) e attiva un “attuatore” che si oppone almeno in parte a questo slittamento. Un esempio molto semplice è costituito dai giunti viscosi. Essi contengono una serie di dischi, forati o leggermente alettati, immersi in un liquido viscoso (spesso genericamente chiamato “olio”) dalle proprietà particolari: all’aumentare della temperatura questo “olio” anziché ridurre al sua viscosità, come tutti gli olii, la aumenta. Quando i due assi condotti hanno uno slittamento, essi “rimescolano” questo olio, e ne fanno aumentare la temperatura. Ma come la temperatura aumenta, l’olio diventa più viscoso e tende a trascinare insieme i dischi, che in questo modo rimescolano di meno l’olio, che si raffredda e trascina di meno i dischi, e così via finché non si raggiunge un punto di equilibrio in cui gli assi slittano un poco, quel tanto che basta per tenere l’olio abbastanza caldo da permettere solo uno slittamento moderato, ma non così tanto come se il differenziale fosse un autentico "open". Questo caso è un interessante e brillante esempio di ingegneria, poiché l’olio costituisce sia il sensore, rilevando con la sua temperatura la presenza di slittamento tra gli assi, sia l’attuatore poiché aumentando la viscosità tende ad opporsi al fenomeno dello slittamento: più semplice di così!
Il principale pregio di questo sistema è il suo costo di produzione relativamente basso, ma in compenso al sua efficacia è modesta, e inoltre richiede la sostituzione periodica dell’olio pena la perdita di efficacia del sistema. Tuttavia c’è una situazione in cui questo tipo di differenziale ha buone prestazioni, ed è come differenziale centrale abbinato a differenziali TorSen o "locked" ai ponti, come vedremo nella terza parte di questa serie.
· Legge 1: La velocità di rotazione dell’albero conduttore è sempre il valore medio delle velocità degli alberi condotti.
La
seconda Legge ci dice che dentro al differenziale LSD c’è una frizione:
· Legge 2: Se è disponibile, l’asse condotto che ruota a velocità minore riceve una quantità fissa di coppia.
E se non è disponibile? In questo caso non c’è abbastanza coppia per permettere agli assi condotti di ruotare a velocità differenza e il differenziale si comporta come se fosse un "locked".
L'uso dei blocchi nella guida
Introduzione
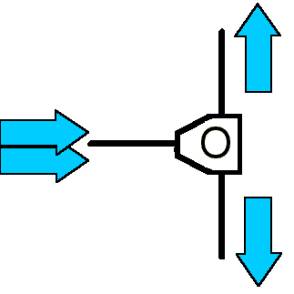
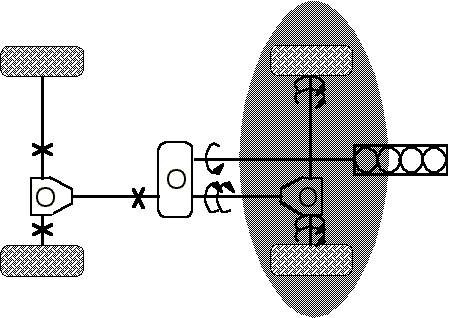
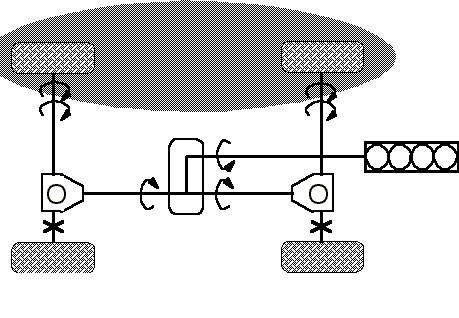
Consideriamo
nuovamente il nostro fuoristrada semplificato, prescindendo, come già fatto
nell’altra puntata, dal rapporto di riduzione del cambio e della coppia conica
presente nei differenziali. Consideriamo nei nostri esempi la classica
architettura di un fuoristrada con tre differenziali (trazione integrale
permanente): il motore, rappresentato con i 4 cilindri, aziona tramite un albero
di trasmissione in differenziale centrale, anche noto come “transfer o nel
paesi di lingua inglese come X-case, che distribuisce il moto a due assi di
trasmissione, uno verso il differenziale e il pone anteriore e uno verso il
differenziale a ponte posteriore. Sui due ponti, due differenziali provvedono a
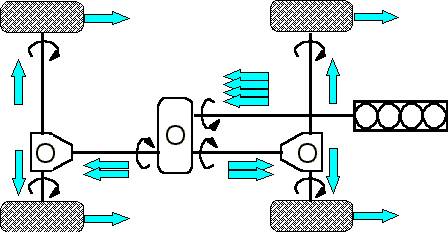
trasmettere la coppia motrice alle ruote. Iniziamo considerando il caso in cui i
differenziali siano tutti di tipo "open". Le “solite” quattro unità
arbitrarie di coppia motrice generate dal motore vengono egualmente divise dal
differenziale centrale in due unità verso il ponte anteriore e due unità verso
il ponte posteriore. I differenziali ai ponti dividono ancora per due la coppia
motrice disponibile verso le due ruote sullo stesso asse, cosicché su ogni
ruota arriva un quarto della coppia motrice, che si trasforma in forza di
trazione all’interfaccia tra ogni ruota e il suolo.
Consideriamo
questo schema perché è sia il più “completo” dal punto di vista
fuoristradistico, sia perché i casi in cui la macchina abbia solo due
differenziali, come nel caso di molti veicoli con trazione integrale inseribile,
sono riconducibili a casi particolari, ottenuti da questo immaginando che un
differenziale sia “bloccato”. In generale, il differenziale che dovremo
considerare bloccato è quello centrale.
La piccola “O” scritta al centro dei differenziali indica appunto che essi dono di tipo "open", ovvero l’usuale differenziale installato sulla maggior parte dei veicoli. Le frecce indicano anche le velocità di rotazione (ricordiamo sempre che per semplicità prescindiamo dai rapporti di riduzione, che hanno solo l’effetto di ridurre il numero di giri man mano ché andiamo dal motore verso le ruote, e di aumentare la corrispondente coppia motrice. Questa semplificazione cambia soltanto il valore assoluto di coppia motrice disponibile alle ruote ma non inficia in alcun modo i ragionamenti qualitativi che vogliamo fare rispetto alla guida.).
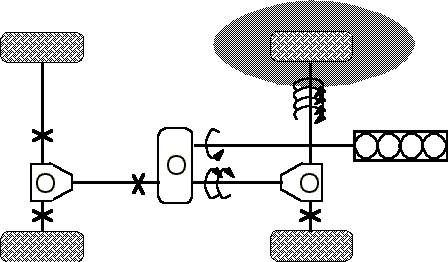
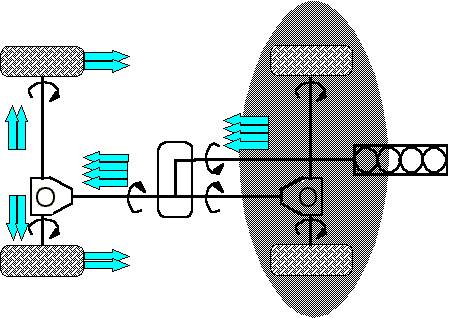
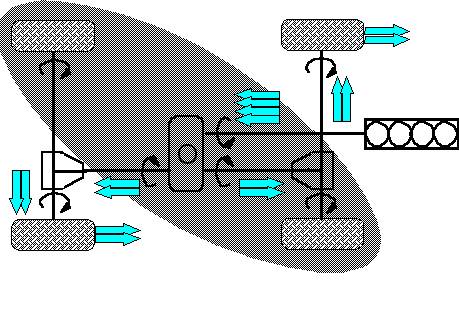
Una Ruota Senza Aderenza
La
prossima figura mostra cosa succede quando una ruota si trova in condizioni di
poca o nulla aderenza, rappresentata dalla “chiazza” nera nella figura.
La
ruota in mancanza di aderenza ruoterà a vuoto opponendo una minima coppia
sull’asse, e questa minima coppia, riflessa dal differenziale sull’altra
ruota e tramite il differenziale centrale sulle ruote dell’altro asse, non è
sufficiente a far avanzare il veicolo. Vediamo così che in una catena
cinematica con tre differenziali, certo una delle soluzioni più complete, è
sufficiente perdere aderenza su una ruota per trovarsi quasi irrimediabilmente
fermi.
Notiamo
anche subito una cosa: la velocità di rotazione della ruota senza aderenza è
ben quattro volte quella che si avrebbe agli stessi giri del motore in
condizione di normale trazione! Dunque non si potrà insistere col motore
cercando di aumentare la coppia trasmessa a terra, per non incorrere in gravi
rischi di danneggiare qualche cosa nel caso in cui improvvisamente la ruota
riprendesse anche solo per un breve istante trazione!
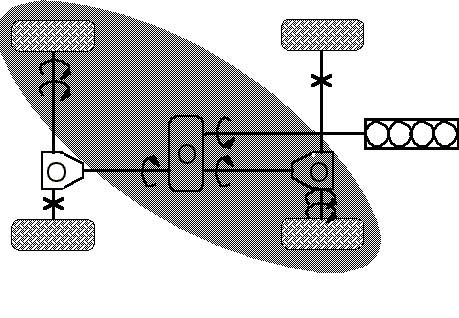
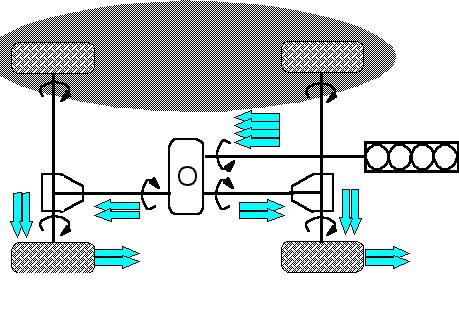
Come
uscire da questo problema?
Tutti
i veicoli a trazione integrale permanente dotati di tre differenziali sono
dotati del blocco del differenziale centrale: bloccando questo le situazioni in
cui una ruota ha aderenza nulla non sono più un problema, come si vede dalla
figura seguente.
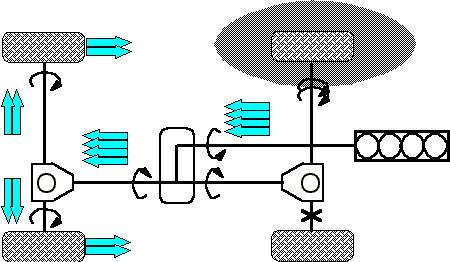
Bloccando
il differenziale centrale si obbligano i due assi condotti di questo
differenziale a ruotare alla stessa velocità: l’asse che va, in questo caso,
alle ruote anteriori, causerà la rotazione solo della ruota che non ha
aderenza, ma l’asse posteriore trasmetterà la coppia alle ruote posteriori,
che essendo in condizioni di buona aderenza potranno fa r avanzare il veicolo.
Per
i veicoli con due differenziali, rispettivamente al ponte anteriore e
posteriore, questo problema non si presenta: il differenziale centrale non c’è,
e quindi è equivalente al blocco centrale. Questo semplifica la guida, specie
ai guidatori meno esperti, ed è per questo motivo, oltre che per motivi di
costo, che molte macchine hanno appunto solo due differenziali. Naturalmente,
appena usciti dalla situazione critica, il differenziale centrale deve essere
sbloccato. Se le condizioni di aderenza sono comunque non ottimali, il
differenziale centrale potrebbe anche essere lasciato inserito, e infatti le
macchine a due differenziali marciano normalmente in fuoristrada in queste
condizioni, ma potendo sarà sempre meglio disinserirlo.
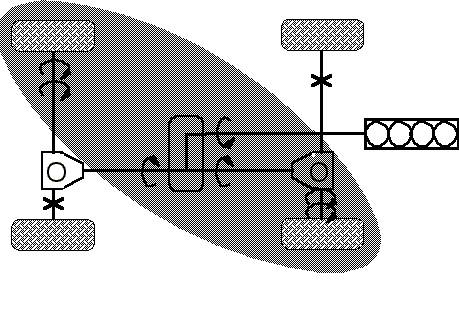
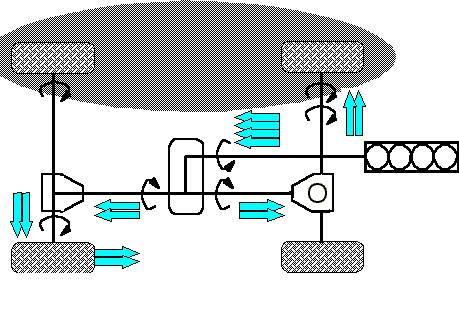
Alternativamente, e nei veicoli in cui questo è possibile, si otterrebbe un effetto simile bloccando il differenziale anteriore, come si vede nella figura seguente. Naturalmente, se il bloccaggio all’anteriore è del 100% si perderà, come abbiamo visto, in guidabilità; se invece all’anteriore abbiamo un differenziale tipo TorSen, che tra l’altro ha il vantaggio
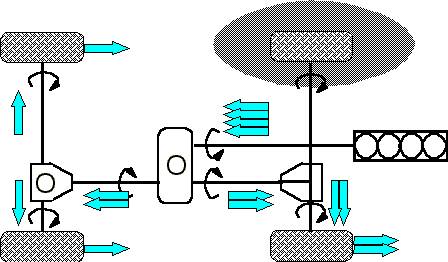
di
essere “sempre inserito”, non perderemo
la possibilità di azionare facilmente lo sterzo, anche se, come abbiamo visto,
la sua efficacia sarà inferiore a quella del differenziale "locked".
Due Ruote Senza Aderenza
Un
altra comune situazione in cui si rischia di rimanere fermi è quella in cui due
ruote dello stesso ponte perdono aderenza. La configurazione con tre
differenziali "open" è mostrata in figura: le ruote posteriori sono
ferme e le ruote anteriori ruotano a vuoto:
Anche
in questo caso il bloccaggio del differenziale centrale è sufficiente a
risolvere il problema: l’asse anteriore e l’asse posteriore sono vincolati a
ruotare alla stessa velocità, e le ruote posteriori che sono in condizioni di
buona aderenza permetteranno al veicolo di muoversi:
In questa situazione invece l’eventuale bloccaggio del differenziale anteriore non sarebbe di nessun aiuto.
Sempre
della serie “due ruote senza aderenza consideriamo i casi in cui sono due
ruote di assi differenti ad essere in condizioni di scarsa aderenza, ad esempio
in una situazione di twist, come indicato nella figura seguente:
In
questo caso bloccare il differenziale centrale non è di alcun aiuto: i due
differenziali anteriore e posteriore trasmettono il moto alle ruote senza
aderenza, e il veicolo non è in grado di avanzare:
Vediamo
che se anche le ruote con aderenza insufficiente sono dallo stesso lato bloccare
il differenziale centrale non serve a risolvere il problema:
Questa situazione può ovviamente fermare anche le macchine con solo due differenziali.
Quello
che ci può trarre di impaccio in questa situazione è il blocco, totale o
parziale, dei due differenziali ai ponti: in questo modo si obbligano le ruote
di ogni ponte a ruotare alla stessa velocità e si recupera dunque trazione. Si
può anche notare che bloccare i due differenziali ai ponti rende inutile il
blocco del differenziale centrale:
La figura seguente mostra l’effetto dei blocchi ai ponti nel caso le ruote senza aderenza siano dallo stesso lato:
Alcuni
montano un differenziale bloccabile solo ad un punte, quello posteriore: in
questo caso si può uscire dalla situazione bloccando sia il differenziale
posteriore che il differenziale centrale per evitare che tutta la trazione
disponibile vada al ponte senza blocco, cioè nel caso ad esempio quello
anteriore. In questo caso però sarà solo una ruota a spingere la macchina, cioè
quella posteriore:
Tre Ruote Senza Aderenza
L’ultimo
caso da considerare infine è quello in cui tre ruote sono in condizioni di
scarsa aderenza, situazione non comune ma neppure impossibile nella pratica del
fuoristrada. Il diagramma mostra la rotazione delle diverse ruote, e
naturalmente l’unica ruota che avrebbe trazione rimane ferma:
Per
uscire da questa situazione è necessario azionare due blocchi: quello centrale,
per mettere solidalmente in movimento gli alberi di trasmissione anteriore e
posteriore, e quello sul ponte dove almeno una ruota ha aderenza, nel caso in
figura quello anteriore. Tutta la trazione disponibile viene così scaricata
sull’unica ruota con trazione che potrà fare avanzare il veicolo, mentre le
altre ruote gireranno a vuoto e non forniranno trazione.
Nel
caso in cui sia una ruota anteriore ad avere aderenza, blocchiamo il
differenziale centrale quello al ponte anteriore:
Nel
caso in cui sia una ruota posteriore ad avere aderenza, bloccheremo il
differenziale centrale e quello al ponte posteriore.
Questo
termina la nostra carrellata sui diversi casi possibili, e passiamo a riassumere
il tutto in una tabella di facile consultazione nel prossimo capitolo.
Tabella Riassuntiva
Alcune
considerazioni finali, prima di guardare una tabellina riassuntiva: abbiamo nei
nostri modelli semplificati considerato il caso estremo di totale perdita di
aderenza e di bloccaggio completo dei differenziali. Questo per illustrare con
la massima semplicità le diverse situazioni e spiegare chiaramente quale
effetto otteniamo azionando i bloccaggi. Nella pratica, le situazioni di totale
perdita di aderenza non sono così frequenti (salvo in quei casi in cui una
ruota sia sollevata da terra) e un bloccaggio solo parziale dei differenziali
sarà più che adeguato per uscire dalla situazione critica che abbiamo
affrontato. Nella terza e ultima parte di questa serie cercheremo di valutare
quantitativamente le prestazioni di una catena cinematica in funzione della
percentuale di bloccaggio dei differenziali e delle diverse condizioni di
aderenza che possiamo aspettarci di trovare.
La
tabella seguente riassume quanto abbiamo esaminato sinora.
Con
"LOCKED" dunque indichiamo un blocco anche parziale dei differenziali:
la possibilità di uscire dalla situazione di guida sarà dipendente dalle
condizioni di aderenza e dalla percentuale di bloccaggio dei differenziali. Un
ultimo consiglio di guida: con differenziali a bloccaggio parziale di tipo
TorSen, può nei casi estremi essere conveniente frenare col piede sinistro e
accelerare dolcemente col piede destro. Perché? Abbiamo visto nella precedente
puntata che un differenziale TorSen trasmette alla ruota che ruota più
lentamente una coppia che è TBR volte quella applicata alla ruota che ruota più
velocemente, ovvero quella con minore aderenza. Applicando dolcemente un po’
di freno alle ruote, il differenziale vedrà una coppia maggiora alla ruota con
poca aderenza e trasferirà TBR volte questa coppia alla ruota con maggiore
aderenza. Sottraendo da questa coppia quella necessaria a vincere l’azione
frenante si avrà un coppia netta maggior utilizzabile per la trazione.
Forse
più di tante parole può aiutare a comprendere questa tecnica di guida che
richiede una certa sensibilità coi pedali per evitare dirompere qualche cosa,
può essere d’aiuto il solito disegno.
Le
frecce orientate in senso opposto al moto rappresentano l’azione dei freni,
che genera per reazione una coppia vista dal differenziale TorSen. Poiché nel
nostro esempio TBR = 3, il differenziale TorSen manda alla ruota con trazione
una quantità di coppia tre volte superiore alla coppia frenante prodotta con i
freni. Questa coppia deve vincere la coppia frenante e il risultato netto sarà
la disponibilità di due unità di coppia disponibili per la trazione:
TBR
= 3
Il Coefficiente d’Attrito
La
capacità del suolo di trasformare la coppia applicata alle ruote in forza
capace di far avanzare il veicolo è misurata dal coefficiente d’attrito (“grip
coefficient” in inglese) tra le ruote e il suolo. Quantitativamente esso è
definito come il rapporto tra la forza necessaria a spostare un oggetto poggiato
su una superficie e il peso che questo oggetto esercita sulla superficie stessa.
Esso dipende da due fattori: la natura della superficie su cui facciamo muovere
l’oggetto e la natura dell’oggetto stesso: lo stesso oggetto, per esempio un
pezzo di gomma, avrà coefficiente d'attrito diverso sopra ad esempio del
cemento, una piastrella asciutta o una piastrella bagnata. Il coefficiente
d'attrito traduce in termini quantitativi precisi concetti quali “strada
scivolosa” o “gomme dalla buona tenuta”: espressioni comunemente usate ma
inadatte ad eseguire delle valutazioni e comparazioni precise.
Il
coefficiente d’attrito può essere misurato con una certa precisione per
diversi tipi di gomma su diverse superfici, e per fissare le idee possiamo
considerare la tabella che segue per avere una idea di quanto sia buona la
trazione su diversi terreni. Viene fornito un certo spettro di valori, poiché
il “grip” che può offrire un certo pneumatico sui diversi fondi dipende da
molti parametri, e di converso pneumatici di diverso disegno e mescola (e anche
a diversa pressione di gonfiaggio o su cerchi di diversa dimensione) hanno
comportamenti differenti sullo stesso fondo percorso: al solito quello che ci
interessa qui è capire il comportamento del nostro fuoristrada nelle diverse
situazioni più che eseguire delle precise misurazioni di valore più teorico
che altro.
La
gomma che consideriamo nella tabella seguente è una gomma di buona qualità con
un disegno adatto al fuoristrada (diciamo un 50/50): sono dunque escluse da un
lato le gomme puramente “cross”, che mostreranno un grip migliore nelle
situazioni di bassa aderenza e dall’altro lato quelle impiegate sui veicoli
ricreazionali, con disegno sostanzialmente stradale e che mentre hanno grip
migliori di quelli della tabella nelle condizioni di buona trazione sono invece
inferiori nelle condizioni di scarsa aderenza.
|
Superficie |
Coefficiente
d'attrito |
Commenti |
|
praticamente
senza trazione |
0.0
-- 0.1 |
da “ruota sollevata” a condizioni di twist estremo |
|
superfici
scivolose |
0.1
-- 0.3 |
da
ghiaccio a erba umida, fango scivoloso, foglie e terreni smossi |
|
tipici
percorsi fuoristrada in cattive condizioni di aderenza |
0.3
-- 0.5 |
da
neve ed erba a fango, sabbia, granigliati umidi e asciutti |
|
tipici
percorsi fuoristrada in buone condizioni di aderenza |
0.5
-- 0.7 |
da
sterrati anche smossi a fondi non pavimentati |
|
condizioni
tipiche delle strade asfaltate |
0.7
-- 0.95 |
da
asfalto vecchio ad asfalto nuovo e asciutto |
La tabella si riferisce ad ogni ruota singolarmente, e non sarà raro avere una ruota in una condizione di aderenza buona e una in condizioni cattive. Inoltre in un tipico percorso fuoristrada si incontrano tipi di fondo anche molto diversi a breve distanza l’uno dall’altro.
Se moltiplichiamo la coppia prodotta dal motore (per esempio 30Kgm) per i rapporti di riduzione del cambio, del riduttore e dei ponti, otteniamo la coppia applicata collettivamente alle ruote. Come ormai sappiamo bene questa coppia viene generalmente distribuita in modo eguale tra le ruote da una serie di differenziali "open".
Facendo qualche semplice calcolo, supponiamo di essere in terza ridotta (3L) con il motore bene in tiro: 30kgm del nostro motore diventano ben 490kgm all’uscita di cambio e riduttore e oltre 1700kgm globalmente applicati alle ruote dopo la coppia conica ai ponti. Di questi, ciascuna ruota ne riceve ¼, e cioè più di 400kgm. Si ottiene la trazione prodotta da ciascuna ruota dividendo questo valore di coppia per il raggio di rotolamento della ruota: se supponiamo di avere una 7.50R16, il cui raggio di rotolamento è di circa 38cm, troviamo che ogni ruota potrebbe esercitare una trazione di ben 1100kg in condizioni di grip ideale, cioè con coefficiente d'attrito =1. Adeguati per portare una macchina da circa 2000kg di peso in cima a una salita a 45 gradi senza alcun problema (includendo nel calcolo il coseno dell’angolo di rampa)!
Quello che ci impedisce di salire con disinvoltura è il coefficiente d'attrito, ben inferiore a 1, più la “perdita” addizionale dovuta al coseno dell’angolo di rampa. La massima forza di trazione che l’interfaccia battistrada – suolo è in grado di sostenere è data dal coefficiente d'attrito moltiplicato per il peso applicato sulla ruota: per esempio nel caso di una macchina di 2000kg equamente distribuiti sulle quattro ruote, cioè quindi 500kg per ruota, il massimo che possiamo sperare di ottenere su asfalto è circa 500kg di spinta per ogni ruota, che si riducono a 250 – 350kg in fuoristrada, e molto meno in condizioni di trazione veramente scarse. Poiché abbiamo visto che il motore ha una esuberanza di potenza e può scaricare sulle ruote livelli di coppia molto elevati, ecco che lo slittamento delle ruote nella guida in fuoristrada, complici sia l’uso delle marce ridotte che la cattiva aderenza del fondo, è più la norma che l’eccezione.
Non è solo l’aumento della coppia applicata a causare lo slittamento delle ruote, ma anche la diminuzione del grip disponibile. Se stiamo modulando l’acceleratore per ottenere dal motore giusto la coppia che ci serve per affrontare una impegnativa salita in aderenza, e improvvisamente il fondo che percorriamo diventa meno aderente, ecco che la ruota corrispondente comincerà a slittare, perdendo trazione e pregiudicando al possibilità di procedere.
Una ultima considerazione: sembra dai semplici calcoli che abbiamo fatto che la trazione disponibile sia in generale molto grande, e non sembra quasi comprensibile cosa serva così tanta coppia per viaggiare normalmente in pianura fuoristrada. La necessità di una elevata coppia e trazione viene in generale dal fatto che la marcia in fuoristrada richiede uno sforzo molto superiore alla marcia su un fondo liscio e compatto. Il fondo su cui si marcia fuoristrada è sconnesso, e davanti alle ruote si presentano continuamente sassi, buche e altre piccole o grandi irregolarità. Tali irregolarità agiscono sulle ruote proprio come una continua salita che deve essere superata. Nella marcia su fondi morbidi, sui quali il galleggiamento del pneumatico non è adeguato, si forma in continuazione davanti al pneumatico un muro alto talvolta anche 10 e più centimetri, come nella marcia su sabbia molto soffice, che deve essere superato continuamente.
Il Concetto di MAG
Una ruota può essere ora nel fango e avere poca aderenza, ora trovare una ramo, un sasso o una radice che restituiscono temporaneamente alla ruota una certa aderenza, e dall’altro lato del ponte l’altra ruota può essere in una situazione completamente opposta. Il numero di condizioni che ci si trova a dover affrontare è molto alto, e non possiamo semplicemente enumerare tutti i diversi casi per valutare l’efficacia di un certo sistema di trasmissione in ciascun caso e confrontare poi tutti i casi e cercare una sintesi: dobbiamo utilizzare qualche altro metodo di valutazione più sintetico.
Come si calcola il MAG?
Ad esempio supponiamo di avere un ponte equipaggiato di un differenziale "open", e questo ponte ha una ruota su un fondo ad aderenza media con un coefficiente d'attrito di 0.6 e l’altra ruota per esempio su dell’erba umida, che ha coefficiente d'attrito anche solo di 0.2.
Applichiamo un piccolo valore di coppia al differenziale, e questo la dividerà, coem sappiamo dall esue Leggi, in due quantità uguali applicate alle due ruote. La coppia è bassa e le ruote non slittano.ma se ora cominciamo ad aumentare la coppia palliata, ad un certo momento la coppia sarà abbastanza grande da far slittare, ovviamente per prima, la ruota con il coefficiente d'attrito più basso, quella sull’erba. Il fatto che l’altra ruota sia in condizioni di buona aderenza non ci è di nessun aiuito: un aumento del pedale dell’acceleratore farà girare più rapidamente il motore e la ruota sull’erba slitterà sempre maggiore velocità, ama la ruota in buone condizioni di aderenza non potrà comunque ricevere più che la stessa coppia di quella che slitta, proprio come se il coefficiente d'attrito fosse solo 0.2.
Possiamo dunque dire che in questa situazione il MAG è dato da
MAG
= 0.2 + 0.2 = 0.4
Possiamo rappresentare su un grafico questo risultato: supponiamo che la ruota sinistra abbia un coefficiente d'attrito di 0.2, mentre sull’asse delle X mattiamo il coefficiente d'attrito della ruota destra, ottenendo il grafico seguente:
Si vede che in un differenziale "open" il MAG è sempre limitato al doppio del coefficiente d'attrito della ruota con la minore aderenza.
Se avessimo avuto un differenziale bloccato, la ruota sull’erba non avrebbe slittato, essendo rigidamente collegata alla ruota a più alta aderenza. Possiamo applicare sempre più coppia, finché ad un certo punto tutte e due le ruote cominciano a slittare insieme.
Questo
succede quando applichiamo abbastanza coppia da far slittare la ruota con
coefficiente d'attrito di 0.2 più quella con coefficiente
d'attrito di 06: il MAG è dunque:
MAG
= 0.2 + 0.6 = 0.8
Rappresentiamo
la situazione su un grafico: al solito la ruota sinistra ha un coefficiente
d'attrito di 0.2 mentre alla ruota destar applichiamo una coppia sempre
maggiore, ottenendo:
La
situazione è ben diversa dal caso "open": con un differenziale locked,
il MAG è dato dalla somma dei due grip disponibili alle due ruote.
E
cosa succede con un differenziale TorSen?
Supponiamo
che sia TBR = 3. Quando la coppia sulla ruota sull’erba raggiunge il valore
che la farebbe slittare, il TorSen, per via del suo principio di funzionamento,
trasmette alla ruota con un buon grip una coppia tre volte superiore. Questo
valore di coppia è appena sopportabile senza slittare da una ruota con un
coefficiente d'attrito tre volte superiore, cioè pari a 0.6, che è proprio il
valore che abbiamo sulla ruota con migliore aderenza.
A
questo punto è chiaro che il MAG p dato da:
MAG
= 0.2 + 0.6 = 0.8
Ma
se aumentiamo ancora la coppia disponibile, le ruote cominceranno a slittare
tutte e due, e il MAG non potrà superare il valore di 0.8.
Anche
se la trazione disponibile sulla ruota in buone condizioni di aderenza fosse
migliore, con un TorSen non potremmo ottenere un MAG superiore: infatti con un
TBR di 3 la ruota con coefficiente d'attrito di 0.2 non può riflettere alla
ruota con maggiore aderenza più di coppia di quanta ne servirebbe per far
slittare una ruota cion coefficiente d'attrito di 0.6: questo si vede
chiaramente se si confronta il grafico del MAG del TorSen con quello del
differenziale "open": c’è tutta una regione in cui i due sistemi si
equivalgono, e precisamnte per i coefficiente d'attrito compresi tra poco meno
di 0.1 e 0.6, ma al di sotto e al di sopra, il TorSen ha un MAG inferiore al
"locked".
Il MAG per un Ponte
L’area
compresa al di sotto dei grafici ci dà una idea delle prestazioni generali del
ponte nelle diverse condizioni che si incontrano. I grafici che abbiamo visto
considerano però assumono che una ruota abbia un coefficiente d'attrito fisso,
nei nostri casi 0.2, e a variare sia solo il coefficiente d'attrito dell’altra
ruota. Questo ovviamente non è quanto succede nella realtà, e dobbiamo invece
considerare che il coefficiente d'attrito varii su tutta la scala per ambedue le
ruote. Ci serviamo in questo caso di grafici tridimensionali per rappresentare
il MAG disponibile, riportato sull’asse Z, mentre sugli assi X e Y mettiamo il
coefficiente d'attrito delle due ruote individualmente.
I
grafici che abbiamo visto precedentemente sono delle “sezioni” di questo
grafico tridimensionale, ovviamente più generale di quelli. Considerando un
valore del coefficiente d'attrito pari a 0.2 e seguendo le corrispondenti linee
sui grafici si ritrovano esattamente i grafici che abbiamo già visto.
Ma
la vista tridimensionale è molto importante perché il comportamento in
generale del nostro sistema cinematico è descritta sotanzialmnte dal volume al
di sotto della superficie: tanto ,maggiore quasto volume, tanto maggiore
l’efficacia del sistema cinematica in termini di trazione.
Si
vede che il volume sotto la superficie del differenziale "open" è
inferiore a quello sotto il volume del differenziale TorSen, a sua volta
inferiore a quello sotto la superficie del differenziale "locked". I
vantaggi dle TorSen, la possibilità per le ruote di ruotare a diverse velocità,
si paga in termini di minore efficacia globale.
E’
anche interessante notare come il TorSen sia, anche graficamente, in qualche
modo a metà tra un "open" e un "locked": aumentando il
valore del TBR le pareti verticali si fanno sempre più ripide fino a portare un
TorSen molto vicino ad un "locked" per valori di TBR dell’ordine di
6.
Valutazioni Globali
Abbiamo
ora tutto l’apparato concettuale che ci serve per valutare le prestazioni di
un sistema di trasmissione per quanto riguarda la sua capacità di fornire
trazione in condizioni variabili di aderenza: dobbiamo solo più combinare la
trazione del ponte posteriore con quella del ponte anteriore, ma questo
purtroppo non lo possiamo rappresentare con semplice grafico, perchè avremmo
bisogno di 5 dimensioni anziché le 3 disponibili!
Ma quello che ci interessa è più una valutazione globale, una ”figura di
merito” che ci indichi quanto è efficace un certo schema di trasmissione
definito un certo intervallo in cui può variare il coefficiente d'attrito delle
diverse ruote sul terreno, e questo si può calcolare dal volume
multidimensionale compreso sotto la superficie che definisce il MAG per due
ponti. I calcoli sono decisamente complicati e vanno ben oltre gli scopi che ci
stiamo ponendo con questa già piuttosto lunga trattazione, e pertanto ci
accontentiamo di riportare alcune tabelle calcolate per i valori di maggiore
interesse.
Considereremo per completezza il caso in cui il grip vari da 0 a 1, ma poiché
è abbastanza raro trovarsi su un arco così ampio di situazioni, riportiamo
anche due tabelle rappresentative di una situazione di guida in fuoristrada su
sterrati e fango e una su fondi di tipo sabbioso e di pista. Questo significa
ridurre l’ampiezza di variazione del coefficiente d'attrito a un ambito di
variazione più ristretto: da 0.2 a 0.7 per la guida su sterrati e fango e da
0.3 a 0.6 per sabbia e piste di tipo sahariano.
|
Diff
Post |
Diff
Centrale |
Diff
Ant |
Figura
di Merito |
||
|
0.0
– 1.0 (globale) |
0.2
– 0.7 (sterrati
e fango) |
0.3
– 0.6 (sabbia
e piste) |
|||
|
open |
open |
open |
0.74 |
1,17 |
1.42 |
|
locked |
open |
open |
1.04 |
1.32 |
1.51 |
|
open |
60% |
open |
1.11 |
1.45 |
1.59 |
|
50% |
open |
50% |
1.11 |
1.55 |
1.65 |
|
open |
locked |
open |
1.30 |
1.45 |
1.59 |
|
locked |
60% |
open |
1.48 |
1.62 |
1.69 |
|
locked |
locked |
open |
1.65 |
1.62 |
1.70 |
|
50% |
locked |
50% |
1.73 |
1.79 |
1.79 |
|
locked |
locked |
50% |
1.87 |
1.80 |
1.80 |
|
locked |
locked |
locked |
2.00 |
1.60 |
1.80 |
Caso “Globale”
La tabella è ordinata per valori crescenti della figura di merito per il caso in cui il grip considerato varia da 0 a 1: è chiaro in questo caso che aumentando il livello generale di “blocco” le prestazioni in termini di trazione migliorano. Per un sistema a tre differenziali "open", il principale passo avanti si ha inserendo il blocco al differenziale centrale, che genera un incremento della figura di merito da poco più di 0.7 a 1.3: un netto miglioramento che si può percepire chiaramente quando si guida in terreni con scarsa aderenza generale e si inserisce il blocco centrale.
Una configurazione con un autobloccante all’asse posteriore ci dà prestazioni nettamente migliori della configurazione tutto "open", e confrontabili con due TorSen davanti e dietro con TBR = 2.5, e rimane inferiore di qualche percento rispetto allo schema con due TorSen quando si blocca il differenziale centrale. Uno schema con blocco posteriore e TorSen anteriore è il migliore in quanto a guidabilità e molto vicino ai tre blocchi. Lo schema più conveniente, specie in termini di efficacia rispetto al costo, è in questo caso quello del blocco posteriore al 100%, che dà prestazioni molto vicine al massimo, abbinate sia col differenziale viscoso centrale o totale di serie.
Però osserviamo che nella guida fuoristrada non è poi così importante avere la migliore aderenza in assoluto quando le condizioni di aderenza sono generalmente buone, mentre è invece assai più efficace avere la possibilità di sfruttare tutta la trazione potenzialmente disponibile quando le condizioni generali di aderenza sono scarse: cambiamo il campo di variabilità del coefficiente d'attrito e vediamo cosa succede…
Caso “Sterrati & Fango”
Riducendo il campo di variabilità del grip il quadro cambia, nel senso che le differenze tra le varie configurazioni si riducono un poco.
Il caso dei tre differenziali "open" è sempre quello che dà le minori prestazioni, e il vantaggio di inserire il blocco centrale è sempre sensibile, ma per le altre configurazioni le differenze sono meno significative. Il miglior risultato lo dà sempre il sistema a tre blocchi, ma gli altri non sono così lontani: un sistema con due TorSen anteriore e posteriore con un TBR = 2.5 è circa equivalente ai tre blocchi, così come un sistema con blocco al ponte posteriore e al centrale. Anche un sistema con un differenziale centrale di tipo viscoso con una percentuale di blocco del 60% accoppiato ad un blocco posteriore al 100% non è molto lontano dal massimo che si può ottenere.
Seppure più costoso un sistema con due TorSen ha il vantaggio soprattutto di mantenere una migliore guidabilità.
Caso “Sabbia & Piste”
Al ridursi della variabilità del coefficiente d'attrito le differenze tra i veri schemi di trazione si fanno sempre meno importanti, come deve infatti essere, poiché le ruote sono sempre di più in condizioni di trazione molto simili tra di loro, e il benefico effetto dei differenziali TorSen o "locked" che siano si fa sentire solo se c’è molta differenza di grip tra una ruota e l’altra. Tutte le configurazioni sono approssimativamente simili, con un graduale miglioramento della trazione disponibile all’aumentare dei blocchi.
Considerazioni Finali
Abbiamo cercato in quest’ultima parte di ricondurre le diverse architetture di trazione ad uno schema semplice che potesse essere valutato in funzione di un solo numero. Questo sforzo è certamente utile, perché ci permette di confrontare rapidamente e quantitativamente diverse architetture in funzione della loro applicazione o destinazione. Tuttavia vi sono altri fattori che devo essere tenuti in conto, la cui valutazione non può essere resa così analitica ma che devono essere valutati qualitativamente, ai quali cercheremo di accennare ora brevemente e che deveono essere comunque tenuti in conto quando si decida di fare queste genere di modifiche al proprio fuoristrada.
Direzionalità dello Sterzo
E’ l’effetto che l’inserimento dei blocchi ha sul controllo direzionale del veicolo. In generale perdere in direzionalità e precisione di guida può impedirci di scegliere la migliore traiettoria o i migliori punti di appoggio per le ruote, magari vanificando i vantaggi che derivano dall’uso di un differenziale potenzialmente migliore. La perdita di direzionalità nella guida arriva al suo estremo con tre blocchi inseriti, generando situazioni nelle quali altro che andare dritti non si può!
Questo problema è in parte compensato dai differenziali automatici che si sbloccano quando si percorre una curva.
Inserimento del Blocco
La facilità e la tempestività con cui il sistema può essere inserito o disinserito può essere un fattore importante nella guida. E’ chiaro che fermarsi per inserire un blocco può essere uno svantaggio nella guida, poiché fa perdere tempo e soprattutto l’abbrivio. Richiede inoltre la valutazione preventiva della necessità o meno di inserire il blocco, cosa che non tutti i piloti sono capaci di fare: molti prima provano, poi mettono il blocco e riprovano, col risultato di avere danneggiato la pista e reso talvolta più difficile il passaggio, oltre ad aver corso il rischio di rimanere fermi a metà dell’ostacolo.
Affidabilità
Un blocco causa comunque una maggiore sollecitazione degli organi meccanici, riducendone l’affidabilità. Ma a parte questo occorre considerare anche i sistemi di comando, eventuali tubi e interruttori, cavetti e altri attuatori, in generale esposti sotto la macchina e sempre a rischio di essere danneggiati.
**
![]()
![]()
© RoverWorld 2000-2012. All Rights Reserved.